Again a good hint 
When connected to the tft I measured 3.3V at the sensor with pinning order like this:
V+ | GND | SIGNAL
SIGNAL is +3.3V if filament is inserted and 0V when empty.
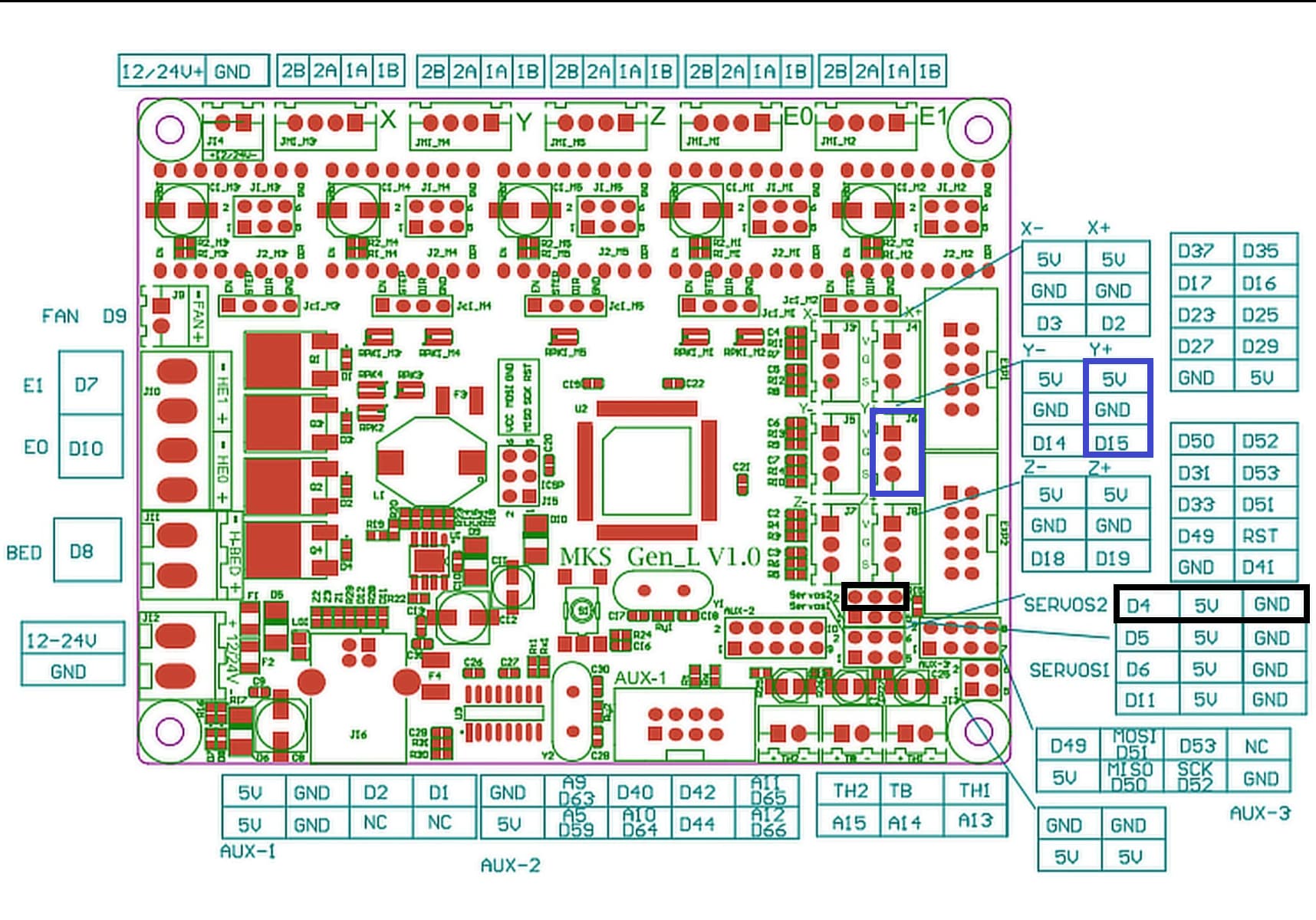
Schematic of MKS Gen L V1.0 shows that the pins there have +5V, so I would mix up +5V from the board with +3.3V from the tft if would create a parallel connection.
So I have to disconnect the cable from TFT.
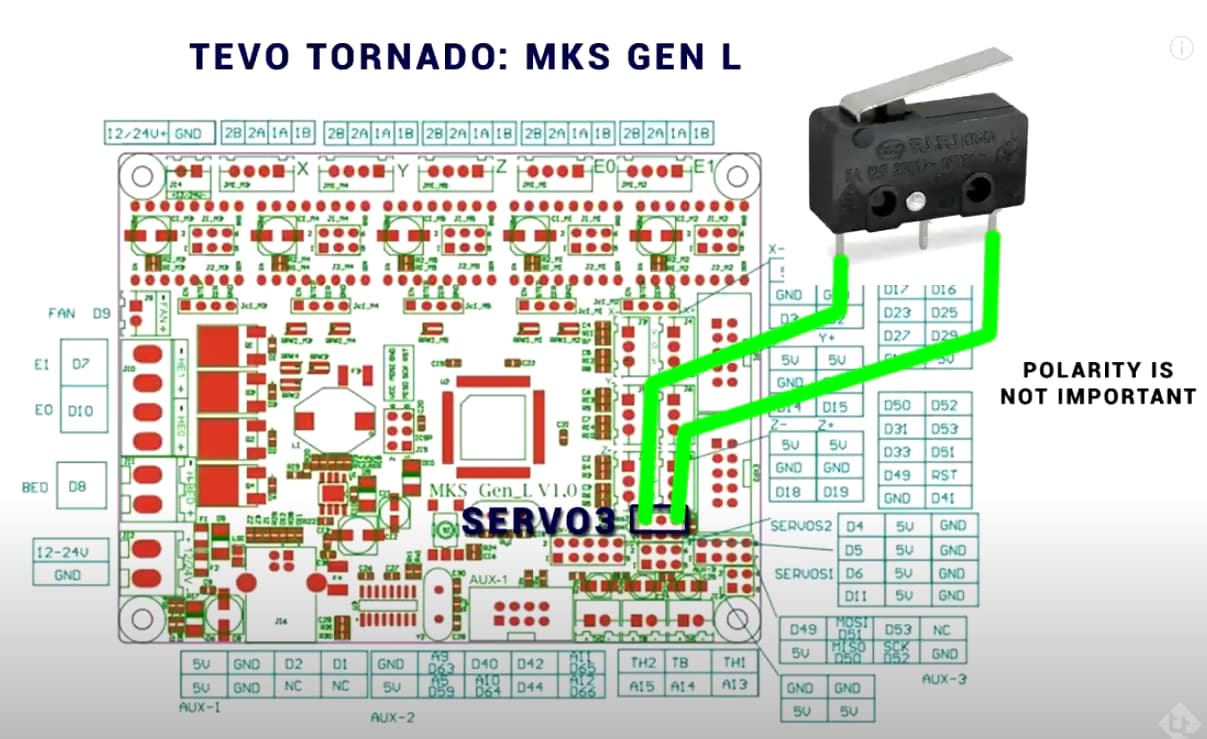
Another notice: In this video you mentioned from Teaching Tech he uses "SERVO3" which is D4 (marked black).
Unfortunately all inputs there (D4, D5, D6, D11) are already in use on my board, also +5V and GND are switched at these pins compared to the order I just measured at TFT, so I would need to switch GND / V+ in the wiring.
But instead "X+" or "Y+" on my board are free, good thing there is also that the pin order is just the same like at the tft so I can simply use the same cable only extended to reach the Y+ socket (marked blue).
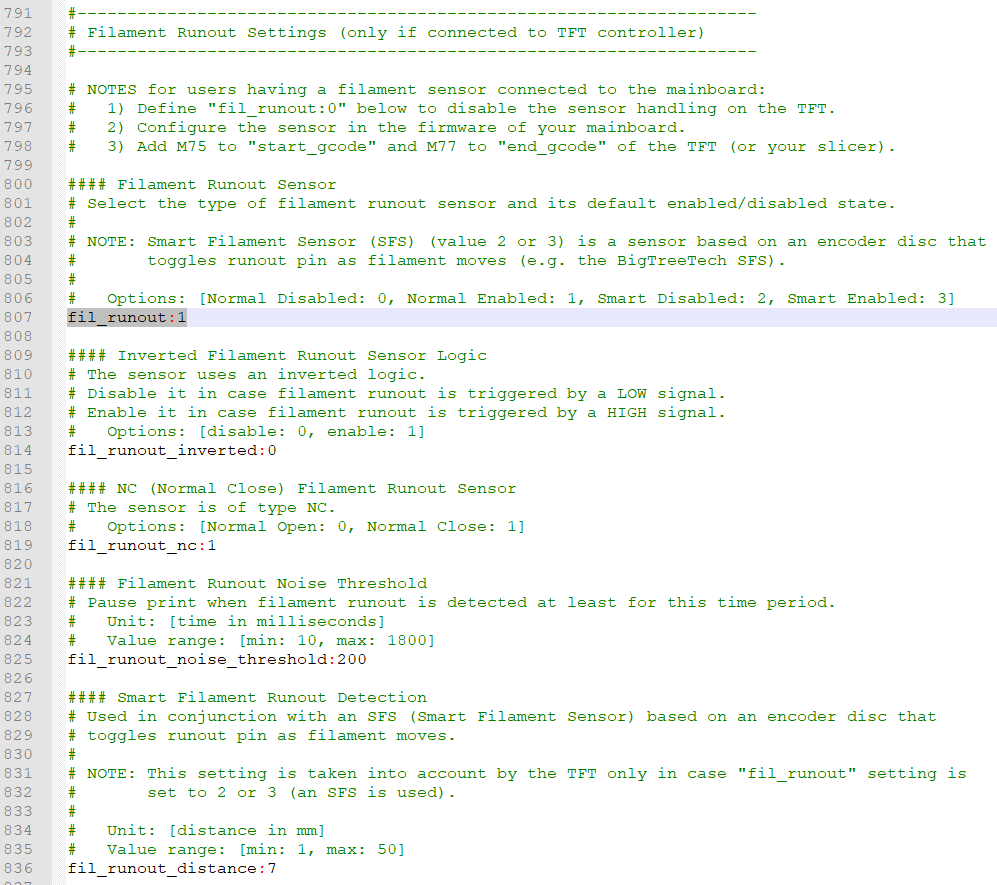
Because I now use another pin I made the following changes in the firmware:
in "pins_RAMPS.h" I changed line 286: #define FIL_RUNOUT_PIN 4 to #define FIL_RUNOUT_PIN 15 and commented out line 123: //#define Y_MAX_PIN 15 // Y+
also I prefer manual unloading for the moment so in Configuration_adv.h I changed line 2647 from #define FILAMENT_CHANGE_UNLOAD_LENGTH 100 to #define FILAMENT_CHANGE_UNLOAD_LENGTH 0.
I could not find the other two mentioned defines from the video: #define FILAMENT_CHANGE_SLOW_LOAD_LENGTH and #define FILAMENT_CHANGE_FAST_LOAD_LENGTH
After flashing that firmware I got following with pronterface:
>>> M503
SENDING:M503
echo:; Linear Units:
echo: G21 ; (mm)
echo:; Temperature Units:
echo: M149 C ; Units in Celsius
echo:; Filament settings (Disabled):
echo: M200 S0 D1.7500
echo:; Steps per unit:
echo: M92 X80.4000 Y80.4000 Z404.6500 E467.8900
echo:; Max feedrates (units/s):
echo: M203 X200.0000 Y200.0000 Z20.0000 E40.0000
echo:; Max Acceleration (units/s2):
echo: M201 X2000.0000 Y2000.0000 Z100.0000 E10000.0000
echo:; Acceleration (units/s2) (P<print-accel> R<retract-accel> T<travel-accel>):
echo: M204 P1000.0000 R10000.0000 T2000.0000
echo:; Advanced (B<min_segment_time_us> S<min_feedrate> T<min_travel_feedrate> X<max_jerk> Y<max_jerk> Z<max_jerk> E<max_jerk>):
echo: M205 B20000.0000 S0.0000 T0.0000 X8.0000 Y8.0000 Z0.3000 E10.0000
echo:; Home offset:
echo: M206 X0.0000 Y0.0000 Z0.0000
echo:; Mesh Bed Leveling:
echo: M420 S0 Z10.0000 ; Leveling OFF
echo:; Z Auto-Align:
echo: M422 S1 X10.0000 Y110.0000
echo: M422 S2 X210.0000 Y110.0000
echo:; Hotend PID:
echo: M301 P22.1896 I2.5554 D48.1709
echo:; Bed PID:
echo: M304 P24.2776 I2.9344 D133.9074
echo:; Z-Probe Offset:
echo: M851 X0.0000 Y0.0000 Z0.0000 ; (mm)
echo:; Input Shaping:
echo: M593 X F40.0000 D0.1500
echo: M593 Y F40.0000 D0.1500
echo:; Linear Advance:
echo: M900 K0.1300
echo:; Filament load/unload:
echo: M603 L0.0000 U0.0000 ; (mm)
echo:; Filament runout sensor:
echo: M412 S1 ; Sensor ON
>>> M115
SENDING:M115
FIRMWARE_NAME:Marlin 2.1.2.1 - DIGA-Tech ASWX1 v1.0 (Feb 24 2025 20:48:24) SOURCE_CODE_URL:github.com/MarlinFirmware/Marlin PROTOCOL_VERSION:1.0 MACHINE_TYPE:Artillery Genius (No Pro) EXTRUDER_COUNT:1 UUID:cede2a2f-41a2-4748-9b12-c55c62f367ff
Cap:SERIAL_XON_XOFF:0
Cap:BINARY_FILE_TRANSFER:0
Cap:EEPROM:1
Cap:VOLUMETRIC:1
Cap:AUTOREPORT_POS:1
Cap:AUTOREPORT_TEMP:1
Cap:PROGRESS:0
Cap:PRINT_JOB:1
Cap:AUTOLEVEL:0
Cap:RUNOUT:1
Cap:Z_PROBE:1
Cap:LEVELING_DATA:1
Cap:BUILD_PERCENT:1
Cap:SOFTWARE_POWER:0
Cap:TOGGLE_LIGHTS:0
Cap:CASE_LIGHT_BRIGHTNESS:0
Cap:EMERGENCY_PARSER:1
Cap:HOST_ACTION_COMMANDS:1
Cap:PROMPT_SUPPORT:1
Cap:SDCARD:0
Cap:REPEAT:0
Cap:SD_WRITE:0
Cap:AUTOREPORT_SD_STATUS:0
Cap:LONG_FILENAME:0
Cap:LFN_WRITE:0
Cap:CUSTOM_FIRMWARE_UPLOAD:0
Cap:EXTENDED_M20:0
Cap:THERMAL_PROTECTION:1
Cap:MOTION_MODES:0
Cap:ARCS:1
Cap:BABYSTEPPING:1
Cap:CHAMBER_TEMPERATURE:0
Cap:COOLER_TEMPERATURE:0
Cap:MEATPACK:0
Cap:CONFIG_EXPORT:0
area:{full:{min:{x:-3.0000,y:-3.0000,z:0.0000},max:{x:220.0000,y:220.0000,z:250.0000}},work:{min:{x:0.0000,y:0.0000,z:0.0000},max:{x:220.0000,y:220.0000,z:250.0000}}}
Because I saw
echo:; Filament runout sensor:
echo: M412 S1 ; Sensor ON
and
Cap:RUNOUT:1
I checked "M119":
>>> M119
SENDING:M119
Reporting endstop status
x_min: open
y_min: open
z_min: open
filament: TRIGGERED
I removed filament from the sensor and now get
>>> M119
SENDING:M119
Reporting endstop status
x_min: open
y_min: open
z_min: open
filament: open
ok P15 B3
So from my perspective this is looking good and I will check a print...